» 30.10.04: Um zunächst einen Einblick in die Funktionsweise und das Datenformat des GPS-Empfängers
zu bekommen, wurde dieser direkt an den PC (RS232) angeschlossen.
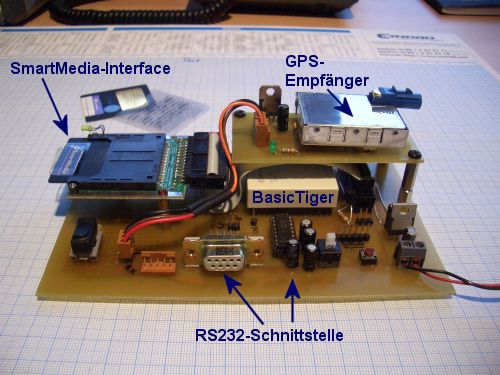
» 03.11.04: Schließlich konnte der GPS-Empfänger an einen Mikrocontroller (BasicTiger, Fa. Wilke) angeschlossen werden, der wiederum die GPS-Daten auf einer SmartMedia-Karte abspeichert. So können Daten aus der Umgebung ohne "Mitschleppen" eines Computers/Notebooks gesammelt werden. Ferner konnte Programmiererfahrung für den BasicTiger in Kombination mit GPS gesammelt werden.
Die Experimentierplatine mit BasicTiger und SmartMedia-Kartenschnittstelle stand bereits aus einem anderen Projekt zur Verfügung.
» 03.11.04: Zur Visualisierung der auf diese Weise gesammelten GPS-Daten wird ein selbstentwickeltes Java-Programm eingesetzt. Es kann GPS-Sätze sowohl aus Dateien lesen (z.B. auf der SmartMedia-Karte), als auch direkt von einem an den PC angeschlossenen GPS-Empfänger empfangen.
» 10.11.04: Nachdem ein erstes Programm zur "groben" Steuerung eines Modellautos für den BasicTiger geschrieben wurde, muss zunächst ein PIC-Mikrocontroller gebrannt werden, der die Ansteuerung des im Monster-Truck befindlichen Servos bzw. Motorreglers übernimmt.
Dies ist mit dem BasicTiger selbst nicht möglich. Dafür hat dieser seine Stärken im Bereich trigonometrischer Funktionen (sinus, cosinus, etc...), was für das GPS-Programm zur Routenberechnung von unschätzbarem Wert ist. Die Kommunikation zwischen BasicTiger und PIC erfolgt seriell über 3 Leitungen (Takt, Daten und Masse / 8 Bit für das Servo gefolgt von 8 Bit für den Motorregler). Dabei steht der Wert 0 für Minimum, 128 für Neutral und 255 für Maximum. Die obenstehende Abbildung zeigt einen 1. Versuchsaufbau. Im Vordergrund sind BasicTiger mit GPS-Modul und SmartMedia-Interface sowie der PIC zu erkennen.
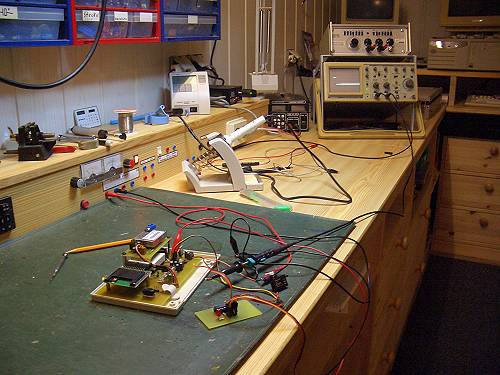
» 20.11.04: Dieses Foto zeigt das "GPS-Monster" vor dem ersten Testlauf. Zu erkennen sind die GPS-Antenne, die bereits oben beschriebene Anordnung aus GPS-Empfänger, BasicTiger und SMediaCard-Interface sowie der PIC zur Ansteuerung von Servo bzw. Fahrtenregler zu erkennen.
Die SMedia-Card ist z.Zt. nicht in Betrieb, soll aber ggf. später zur Einspielung von Routendaten (Wegpunkten) in das "Monster" dienen.