4 Flyer
Bau eines 4-rotorigen Fluggerätes (bevor es sie überall zu kaufen gab)
 » 6.2.04: Zunächst muss ein geeignetes Gestell zur Aufnahme der Elektronik und der Motoren gebastelt werden. Dazu bietet sich die Verwendung von sehr leichten und zugleich sehr stabilen Kohlefaserrohren an. |
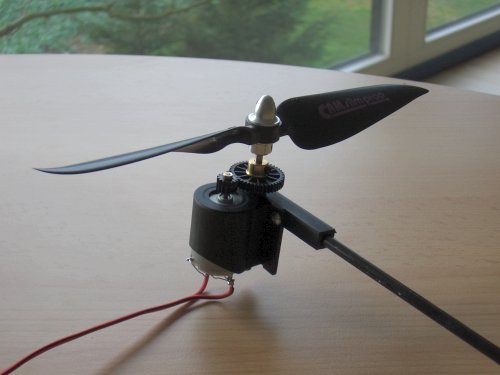 » 14.2.04: Prototyp für eine der 4 Antriebseinheiten unter Verwendung eines Speed 280 Getriebes (1:3) von Graupner. Diese Konstellation sollte sich jedoch wenig später als zu schwer herausstellen... |
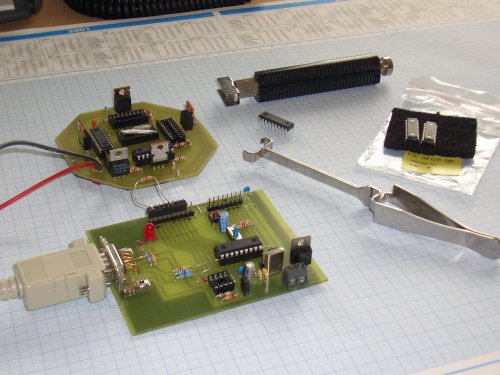 » 24.2.04: Nach Anfertigung einer Platine für die 4 Motorregler und den OnBoard-Mischer zur Ansteuerung der Motorregler müssen die PIC16f628 Mikrocontroller programmiert werden. Zunächst wird eine PWM-Frequenz von 10kHz bei 100 Schritten Auflösung geliefert. |
 » Die Platine bestückt mit 4 Motorreglern. Der Mischer bleibt zunächst ohne Funktion, da das Mischen in der Fernbedienung erfolgt. Ist die Mischabstimmung erflogen, soll sie später in den Mischer programmiert werden. |
 » 14.03.2004: Die schweren Speed280 Getriebemotoren wurden durch ultraleichte Faulhaber 1524-12 Motoren mit angeflanschtem 1:11,8 Getriebe ersetzt. Diese kosten zwar mehr als doppelt so viel (55 Euro pro Stück), verbrauchen jedoch nur 1A statt 4A. Dadurch kann natürlich am Akku gespart werden. |
 » Ebenfalls wurden die handelsüblichen Luftschrauben durch Kohlefaser-Luftschrauben ersetzt (37cm Durchmesser bei nur 7g). |
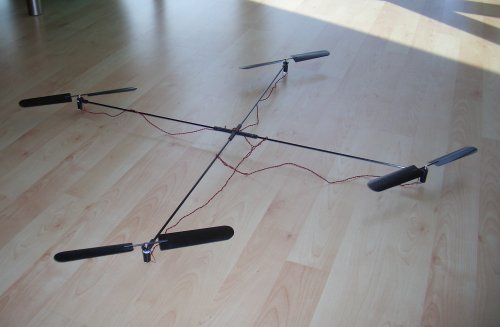 » Der Flieger ohne Akku und Elektronik (Gewicht: ca. 150g). |
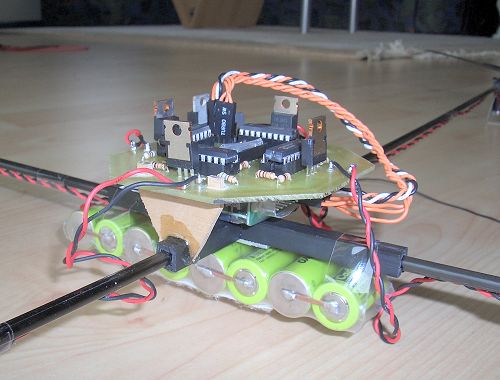 » 16.2.04: Der Flieger mit Akku und Elektronik (Gewicht: ca. 350g mit 500mAh NiCd-Akku). |
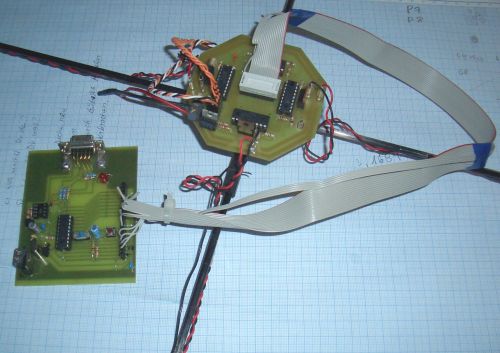 » 23.05.04: Da das Gerät ohne Einsatz stabilisierender Kreisel leider nicht steuerbar ist, muss zunächst der OnBoard-Mischer programmiert werden. Damit während der Testphase der Mikroprozessor nicht immer manuell vom Programmieradapter in den Flieger gesteckt werden muss, habe ich ein entsprechendes Adapterkabel hergestellt. |
 » 11.06.04: Nach erfolgreicher Programmierung des "onBoard"-Mischers zeigte sich, dass das bisherige Gestell zu groß bzw. zu unstabil war. Daher habe ich ein kleineres Gestell angefertigt. Um ein präzises Montieren der Motoren am Gestell zu gewährleisten, habe ich mir fertige Halter für die Motoren bestellt (www.intellicopter.de). |
 » Dank des robusteren Gestells und Einsatz zweier Kreisel für Nick- und Roll-Achse ist der Flieger (ich nenne ihn 4Flyer) jetzt einwandfrei zu kontrollieren. |
 » Dank der selbstgebauten Elektronik liegen die Kosten für den 4Flyer mehr als 50% unter dem Ladenpreis für einen fertigen Flieger. Das Gewicht ohne Elektronik (Gestell, Motoren, Propeller) beträgt 160g. Mit Elektronik und Akku ca. 460 g. |